MİMARİ TASARIMDA YAPAY ZEKA -07: PROBLEMİN TANIMLANMASI VE SENTETİK VERİ ÜRETİMİ
- Mustafa Kemal

- 16 Tem 2020
- 8 dakikada okunur
Güncelleme tarihi: 27 Eki 2020
Literatür araştırmalarında da görülebileceği üzere mimari tasarımda yapay zekanın kullanımı aslında yeni bir fikir değildir. Ancak özellikle son on yıl içinde makine öğrenmesi ve yapay sinir ağlarının kullanıldığı makine öğrenmesinin bir alt dalı olan derin öğrenme tekniklerindeki gelişmeler mimari tasarımda yapay zeka kullanımını birçok farklı alt başlıkta geliştirmek için geniş imkanlar yaratmıştır.
Sahip olunan veya sentetik olarak üretilen büyük miktarda veri YZ uygulamalarını mümkün kılmaktadır. YZ’yı mimaride temel olarak yaratıcılığı modellemek veya simüle etmek amacıyla kullanabilmek tezin amaçlarındandır. İlk programcı Ada Loveloace “makineler yaratablir ama hiçbirşeyin orjini (başlangıç noktası – meydana geliş sebebi) olamaz” demiştir. Herhangi bir yaratıcı özerkliği veya özgünlüğü yaratıcı bir sisteme atfetmek için adaptasyon ve özdeterminizm gerekli görünmektedir. Günümüzde bu özellikleri birebir kural tabanlı olarak kodlamadan ancak büyük miktarda veriden kendi kendine öğrenen YSA kullanan sistemlere kazandırmak mümkün görünmektedir.
Mimaride vaziyet planı tasarımı nesnel ve öznel bir çok tasarım girdisine sahip bir süreçtir. Tüm proje sürecinde yatırım kararlarını en çok etkileyen aşamalardan biridir. Mimari projenin içinde bulunduğu çevre ile kuracağı ilişkinin ana esasları bu aşamada belirlenir. Yapının arsa ve çevre yapılarla ilişkisi, imar koşulları, mali imkanlar, ulaşım çözümleri, manzara, rüzgar, güneşlenme, inşai safhalar, programa dair uygulamalar gibi bir çok etmen tasarımcının üslubu ve içinde bulunulan kültürün de dahil olmasıyla vaziyet planı oluşumuna etki eder.
Mimari tasarıma etki eden etmenlerin bazıları sayısal verilere dönüştürülerek doğrudan analiz etme imkanı sunarken, sayılan üslup ya da kültür gibi bazı etmenleri günümüz imkanları dahilinde sayısallaştırabilmek henüz mümkün olamamakta ya da olsa da genelleştirme ve ölçekleme açısından sıkıntısı yaşatmaktadır.
Araştırma Modelinin Tanımlanması
1- Arsa Veri Seti
Mimari bir tasarım yaparken mesleki pratiğin getirdiği tecrübeye dayanarak ifade etmek uygun olur ki sayısal verilerin tarif edemediği ya da etmediği durumlarda tasarımcının uygun bulduğu çeşitli kabullerle projeyi ilerletmesi makul bir davranış olarak görülebilir. Bu bağlamda, gerek tez konusunun kapsamını çözümlenebilir bir düzeyde tutmak, gerekse lüzumsuz detaylarda kaybolmak yerine asıl meseleye odaklanabilmek adına evrişimli yapay sinir ağlarının vaziyet planı tasarımında kullanılabilirliğini araştırmak için problem ve çözüm uzayı aşağıdaki şekilde tanımlanmıştır:
· Araştırma, birbirine dik 4 kenara sahip, kenarların uzunlukları 50 m ile 150 m arasında değişen arsa biçimleri için geliştirilecektir. Arsalarda herhangi bir eğim bulunmayacak, düz oldukları kabul edilecektir.
· Problem çözümü teknik ya da fonksiyonel detaylarına inilmeden zemin katlar ticari, normal katlar ofis kullanımına ayrılmış yapılar uzayında araştırılacaktır. Araştırma konusu mimari ihtiyaç programının karşılanmasından ziyade mimari biçimlenişte EYSA’ların kullanılabilirliğini sorgulamak olduğundan mimari programa, üsluba, ulaşıma, yapı elemanlarına ve teknik detaylara dair ihtiyaçlar göz önünde tutulmamıştır.
· Arsaların 4 kenarının herhangi birisinde, ikisinde, üçünde ya da tamamında yol bulunabilir. Arsaların yol bulunan kenarlarının karşısındaki yapılaşma biçimi az katlı (yatay) biçimlenmiş ya da çok katlı (dikey) biçimlenmiş olmak üzere 2 biçimlenmeden birine sahip olacaktır.
· Vaziyet planı çözümlemesinde bu farklı yol ve farklı çevre mimari biçimlenişine bağlı olarak 80 farklı kombinasyon ve dolayısıyla bu sayıda çevresel durum ortaya çıkmaktadır.
· Arsa şeklini oluşturan kenarlar alt kenar, sağ kenar, üst kenar, sol kenar olarak isimlendirilmiştir. Bu kenarların bulunduğu kısımlarda yol bulunmasına göre arsa biçimi yol bulunan kenarların isimleri ile belirtilmiştir.
· Problemin tanımında arsa ve yapılaşma biçimlerine dair sınıflandırma listesi aşağıda yer alan tabloda görüldüğü gibidir.

· Aşağıdaki şekillerde örnek çevre verilerinin ifade edildiği 168.000 imajdan oluşan arsa veri setinden rastgele seçilmiş örnekler görülmektedir.

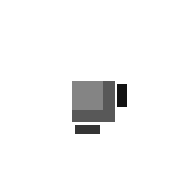
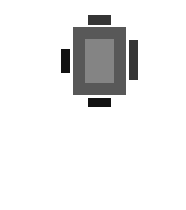




Problem uzayında çevre verilerini ifade etmek için üretilen grafiksel imaj dosyaları siyah-beyaz tonlarında üretilmiştir. Her bir imaj dosyası arsanın biçimini, hangi kenarında yol bulunduğunu ve yol bulunan kenarlardaki karşı komşulardaki yapılaşma biçimini (yatay veya düşey) ifade edecek şekilde düzenlenmiştir.
Her bir grafiğin orta bölümündeki geniş açık gri alan parsel alanını ifade etmektedir. Parsel alanı kenarındaki biraz daha koyu gri alan yol durumunu ifade etmektedir. Yol cephesindeki karşı komşu parseldei yapılaşma biçimini ifade eden tonlar ise koyu gri ton yatay yapılaşma, siyah ton ise düşey yapılaşma ifadesi olacak şekilde düzenlenmiştir.
2- Mimari Karar Kısıtları
Herhangi bir mimari tasarımda tasarımcının genellikle ilk yapacağı şey proje ile ilgili tüm verileri toplamak, derlemek ve üzerinde fikir geliştirmek olur. Tez kapsamında geliştirilen modelin bu minvalde bazı konuları otomatik bir şekilde çözümlemesi ve böylece mimari tasarım sürecinde YZ kullanımına dair anlamlı bir sonuç üretmesi hedeflenmektedir.
Önceki maddelerde tariflenen arsa özelliklerine çevre verileri ile uyumlu bir mimari tasarım yapabilmek için YZ modelinin hangi doğrultuda eğitileceğinin de belirlenmesi gerekmektedir. Genel olarak vaziyet planı tasarımında uygun bulduğmuz yaklaşım, mimarlık tarihi ve şehircilik ilkeleri ile de uygun olarak yapılaşmayı yol kenarında tutmak ve mümkün olduğunca çevreyle uyumlu olmak adına çevre yapılaşmanın yüksekliğine de benzer bir yapı karakterini oluşturmaktır.
Bu temel iki özellik YZ modelinin eğitimi için kullanılacak veri setinin etiketlenmesinde yani sınıflandırılmasında kullanılmıştır. Elde edilen 80 farklı kombinasyona sahip arsa yol durumu ve çevre yapılaşma şeklinin her birine özel bir tasarım çözümü açıklanan bu iki temel yapılaşma kararı ile ortaya çıkmaktadır.
YZ modelinin problem uzayı içinde kullanımı yol ve çevre yapılaşma durumuna göre doğru vaziyet planı stratejik kararını 80 farklı durumiçerisinden seçmesidir. Yapılacak seçim tezin 3.4 Vaziyet Planı Simülatörü maddesinde açıklanan 3 boyutlu vaziyet planı simülatöründe kullanılabilecektir.
Kural tabanlı kullanımdan farklı olarak bir EYSA kullanımının getirdiği temel fayda, çözümün imaj girdileri üzerinde genelleştirilebilmesidir. Vaziyet Planı Simülatörü sayısal verilerin kural tabanlı bir şekilde işlendiği bir programdır. Herhangi bir kullanıcı tarafından görsel bir veriyi algılayacak yada görsel bir veriye tepki gösterecek imkanı bulunmamaktadır. Geliştirilen EYSA modeline, problem uzayı içindeki test verilerinden, yada bu test verilerine benzer başka bir görsel veriden girdi yapılması suretiyle anlamlı bir çıktı (yapılaşma tipini belirleyen 80 farklı değerden herhangi biri) alınabileceğinden alınacak bu sayısal çıktı vaziyet planı simülatöründe kullanılabilecek fe kullanıcının görsel veri girişine 3 boyutlu bir model görünümü çıktı olarak sunulabilecektir.
Tez kapsamında bu bütünleşik yazılımın ve/veya bunu sağlayacak kullanıcı arayüzünün tasarımı dahil bulunmadığından bu alan ile ilgili detaylı bir çalışma gerçekleştirilmemiştir.
3- Kullanılan Yazılım ve Donanım Bilgileri
Araştırma modelinin geliştirilmesinde farklı yazılımlar kullanılmıştır. İşletim sistemi olarak Windows 10 işletim sistemi yüklü bir masaüstü bilgisayar kullanılmıştır. Donanım olarak Pentium I7 7700 işlemci, 8 GB Nvidia GTX 1080 ekran kartı, 16 GB ram bellek ve 256 GB SSD hard disk üzerinde sistem geliştirilmiştir.
Dijital simülasyonun oluşturulduğu ve üç boyutlu modellemenin yapıldığı yazılım bir yapı bilgi modellemesi yazılımı olan Autodesk Revit 2019 öğrenci sürümü ve içerisinde görsel programlamaya imkân veren Dynamo 2.0.2 paket programlarıdır.
Dynamo, Revit içerisinde modelleme bilgilerine ve yapı bileşenlerine dair iş akışını düzenleyen açık kaynak kodlu, hem bir modelleme hem de bir görsel programlama arabirimidir. Revit’ in bir parçası olarak kurulur. Dynamo içerisinde farklı görevler tanımlanmış birçok fonksiyonel işlem elemanı bulunduğu gibi, IronPython 2.7 programlama dili ile farklı programlama imkanı da sunan bir yapıya sahiptir. Dynamo kullanımı ile Revit uygulama yazılım ara yüzüne erişilebilmekte ve program içinde programlama yapılabilmektedir.
Bu imkandan özellikle farklı arsa biçimlerinde farklı yapılaşma imkanlarının nasıl olabileceğine dair simülasyon oluşturulmasında ve EYSA‘ nın eğitimi sırasında kullanılacak arsa ve çevre koşullarını simüle eden imaj veri setlerinin elde edilmesinde faydalanılmıştır. Bu sayede binlerce saat alabilecek sentetik veri seti üretimi birkaç günlük çalışma ile elde edilebilmiştir.
Belirtilen paket yazılımlara ek olarak, simülasyon modelinin geliştirilmesi sırasında ihtiyaç duyulan kodlar Python 3.6 sürümü üzerinde yazılmış, entegre geliştirme ortamı olarak Spyder 3 kullanılmıştır.
4- Vaziyet Planı Simülatörü

Araştırma konusu olan problemin çözüm uzayını belirleyebilmek ve olası hataları önceden tespit edebilmek amacıyla tanımı yapılan araştırma modelinin kural tabanlı bir model simülasyonu Dynamo yazılımı ile oluşturulmuştur.
Bu model simülasyonu, tanımda belirtilen maddelere uygun olarak, birbirine dik dört kenardan oluşan dikdörtgen bir parselin; kenarlarında yol bulunup bulunmaması ve yol bulunan kenarlarının karşı parselindeki yapılaşmanın yatay ya da dikey yapılaşma özellikleri taşımasına bağlı olarak önceden belirlenmiş kurallar dahilinde yapılaşma biçimi oluşturmasını sağlayacak şekilde programlanmıştır.
Ek 1 de belirtilen 80 farklı durum vaziyet planı simülatöründe farklı arsa büyüklükleri, yol durumları, KAKS ve TAKS oranları ve çevre yapılaşma durumları ayrı ayrı simule edilerek otomatik şekilde model elde edilebilmektedir. Bu farklı durumlar Python yazılım dili kullanılarak elde edilen ve sayısal ifadelerden oluşan kombinasyonlar dizisi ile politikalar listesine dönüştürülmüştür.
Politikalar listesi; yapılaşma şartlarını belirleyen her bir ayrı sayısal yada durumsal verinin ifade ettiği yapılaşma politikalarının bir çok kombinasyonundan oluşan listeyi ifade etmektedir.
Politikalar listesi; arsanın kenarları (a: en, b: boy), yol durumu (c), KAKS durumu (d), TAKS durumu (e), maksimum bina yüksekliği (hmax: f) ve çevre yapılaşma politikası (80 farklı durumdan birini ifade eden g: çevre yapılaşması) bileşenlerinden oluşan listeler serisidir. Politikalar listesi oluşturulduktan sonra her bir farklı durum için liste indeks numaralarından yapılan seçimler ile model simülasyonunun listede yer alan sayısal kodlara uygun olarak 3 boyutlu modeli otomatik şekilde oluşturması sağlanmıştır.
Politikalar listesi; [a:arsa eni, b:arsa boyu, c:yol durumu, d:KAKS, e:TAKS, f:hmax, g:çevre yapılaşma] kök listesinin belirli kurallara göre karmaşık bir seri sıralama ile iç içe bir liste haline getirilmesi ile elde edilir. Elde edilen politikalar listesi Dynamo içinde model simülasyonunun arsa, yol, yapılaşma gibi bileşenleri üretebilmesi için temel parametreler olarak kullanılır. Python dili kullanılarak elde edilen politikalar listesinin rastgele 10 adet politikalar listesi üretecek şekilde düzenlenmiş kodu EK 2 de gösterildiği şekildedir.
Bu kodu kullanarak elde edilen 10 elemanlı politikalar listesi için bir örnek şu şekilde elde edilebilmektedir:

[[82, 79, 13, 19, 32, 14, 58], [136, 119, 0, 17, 34, 13, 58], [107, 130, 0, 11, 36, 17, 58], [97, 130, 3, 21, 34, 9, 6], [93, 135, 1, 19, 38, 10, 2], [111, 135, 5, 13, 33, 13, 13], [101, 130, 11, 20, 40, 6, 44], [98, 74, 4, 24, 31, 15, 9], [113, 134, 12, 13, 38, 17, 52], [97, 78, 13, 20, 35, 20, 62]]
Elde edilen politikalar listesi Dynamo içerisine aktarılarak politika durumu seçimi yapılır. Seçilen politika durumundaki her bir değer model simulasyonundaki arsa ölçüleri, yol durumu, KAKS değeri, TAKS değeri, bina yüksekliği, çevre yapılaşma durumuna ait alt fonksiyon kodlarının temel veri girdisini oluşturur.
Vaziyet planı model simülasyonu ile test edilen araştırma uzayı aynı zamanda EYSA için imaj veri seti üretmek için kullanılmıştır. Ancak dosyanın yoğun kod yapısı nedeniyle her bir farklı durum için imaj setleri üretmenin, tez çalışmaları sırasında öngörülenden çok daha uzun zaman aldığı tespit edilmiş ve imaj veri setlerini üretmek için farklı yöntemler araştırılmıştır.
5- Arsa ve Çevre Yapılaşma İmaj Veri Seti
Vaziyet planı model simülasyonu ile problem uzayının incelemesi ve test edilmesi başarı ile gerçekleştirilmiş ancak EYSA eğitimi için imaj veri seti üretiminin çok uzun zaman alacağı tez araştırması sürecinde tespit edilmiştir. Problem uzayının çözüm kümesinde bulunan farklı durumları temsil etmek ve bunlardan imaj veri seti elde etmek üzere kullanılabilecek açık kaynak kodlu yazılımlar araştırılmıştır. Yapılan araştırmalar neticesinde Havar Vassaug tarafından Andreas Dieckmann ve Julien Benoit ile birlikte 2014 yılında Dynamo içerisinde kullanılmak üzere geliştirilen Dynanimator açık kaynak kodlu yazılım paketinin kullanılabileceği tespit edilmiştir.
Dynanimator paketi ile, Revit uygulama programlama ara yüzüne erişerek çeşitli model bileşenlerinin parametrelerinin seri halde değiştirilerek aynı anda – eş zamanlı olarak, her değişimin ardından belirlenecek kamera ve kamera açısı ile resim dosyası olarak kayıt altına alınabileceği bir uygulama tez kapsamında imaj veri seti üretmeye uygun çözüm olarak görülmüştür.
Dynanimator kullanımı ile, tez kapsamında tanımlanan problem uzayında yer alan 80 farklı yerleşim için arsa boyutlarının değiştirilmesi suretiyle binlerce imajdan oluşan veri seti elde edilmiştir.
Her bir farklı yerleşim tipi için 2100 adet olmak üzere 80 farklı yerleşim için 168.000 imajdan oluşan veri seti yaklaşık 5 günlük çalışma ile elde edilebilmiştir. Farklı vaziyet planı durumları için elde edilen her 2100 adetlik imaj veri seti bağlı olduğu duruma ait isimlendirilmiş bir dijital klasör içinde toplanmıştır. Her bir farklı duruma ait imaj veri setlerinin o durumla ilgili olarak isimlendirilmiş klasörlerde kayıt altına alınması daha s onraki aşamalarda EYSA’ nın eğitimi sırasında veri setlerini ve çıktıları etiketlemekte kullanılacaktır.

Veri setindeki vaziyet planı imajları 186 x 186 piksel ebatlarında ve tek kanallı olarak üretilmiştir. Üretilen imajlarda arsa alanını belirleyen kısım RGB 150 150 150 renk koduna, yolları belirleyen kısımlar RGB 100 100 100 renk koduna, çevre yapılaşmanın yatayda yapılaştığını ifade eden kısımlar RGB 60 60 60 renk koduna, evre yapılaşmanın düşeyde yapılaştığını ifade eden kısımlar ise RGB 20 20 20 renk koduna sahip olarak tanımlanmıştır.
EYSA’ nın eğitimi sürecinde veri setinin büyüklüğü ve veri setini oluşturan her bir imajın ebatları eğitim için ihtiyaç duyulan kaynak miktarını doğrudan etkilemektedir. Örneğin imajlar gri tonlarında (tek kanallı) olmak yerine renkli (RGB – 3 kanallı) olarak oluşturulsalardı, bu işlem hacminin yaklaşık olarak 3 katına çıkmasına sebep olacaktır. Bununla birlikte imaj ebatları 186 x 186 piksel yerine örneğin 256 x 256 piksel olarak seçilmiş olsalardı (256x256) / ( 186x186) = 1.89 kat daha fazla parametre olmasına sebep olacaktır.

Veri seti oluşturulurken, arsa ve yapılaşmayı ifade eden çizimin 186 x 186 piksellik imajların farklı farklı bölgelerinde yer almasına dikkat edilmiş, bu sayede veri setinde homojenlik sağlanmaya çalışılmıştır. Bu işlem, EYSA’ nın eğitimi sırasında veri büyütme işlemleri uygularken farklı yönlerde simetri kullanmaya da imkân vereceği için veri seti üretme sürecini uzatmış olsa da veri kalitesini arttırabilmek için olumlu bulunmuş ver uygulanmıştır. Üretilen veri setinin %20’ lik kısmı karışık şekilde doğrulama veri seti olarak ayrıştırılmıştır. Geri kalan %80’ lik kısım eğitim seti olarak kullanılmıştır.



Comments